
Данная работа относится к разработке механических систем направленной транспортировки лекарственных средств, основанных на дистанционной стимуляции внешним магнитным полем на первом этапе, способствующей позиционированию платформы адресной доставки на основе феррогеля в потоке жидкости.
Магнитоактивные биополимерные шарики рассматривались как прототип имплантата для нужд заместительной терапии и регенеративной медицины. Синтезированы сферические феррогели альгината кальция (ФГ) диаметром ~2,4 мм, наполненные 12,6% массовой долей частиц магнетита диаметром 200–300 нм. Проведено детальное описание физико-химических и магнитных свойств ФГ, а также прямые измерения полевой зависимости силы притяжения ФГ-шариков. Гидродинамические эффекты позиционирования ФГ-шариков в потоке жидкости магнитным полем исследованы экспериментально на модельном сосуде с потоком жидкости. Результаты эксперимента были сопоставлены с результатами математического и компьютерного моделирования и показали соответствие. Проведенное моделирование качественно воспроизводит полученные экспериментальные результаты, однако имеются количественные расхождения. Также в рамках исследования был рассмотрен вклад гидродинамических и магнитных сил, действующих на ФГ-шарик в потоке жидкости. Установлено, что гидродинамическая сила стремится не только переместить шарик феррогеля вдоль трубки, но и удержать его на равном расстоянии от ее стенок. Вместе с вкладом магнитной силы это приводит к неравномерному движению сферического образца по сложной траектории, при которой становится трудно прогнозировать захват образца магнитом. Полученные значения усилий для одного феррогелевого имплантата достигали значений от 0 до 10–4 Н для диапазона внешнего поля от 0 до 35 кА/м, что в полной мере соответствует диапазону механических силовых воздействий в живых системах.
Представленные в данном исследовании результаты по дистанционному позиционированию сферической биосовместимой платформы могут быть полезны при разработке систем доставки лекарственных веществ.
Скачать PDF 7988KB (статья на английском языке)
This work belongs to the development of mechanical force-responsive drug delivery systems based on remote stimulation by an external magnetic field at the first stage, assisting the positioning of a ferrogel-based targeted delivery platform in a fluid flow.
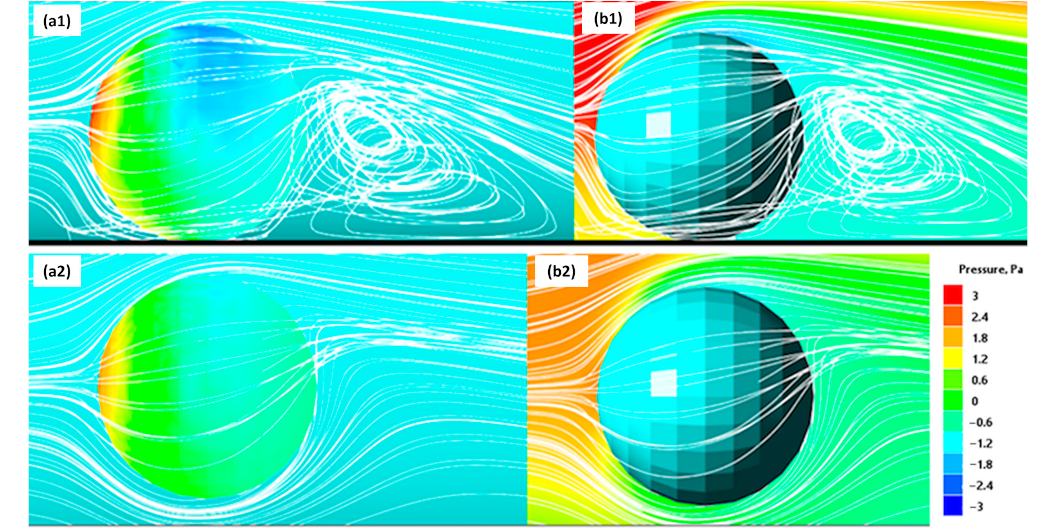
Magnetically active biopolymer beads were considered a prototype implant for the needs of replacement therapy and regenerative medicine. Spherical calcium alginate ferrogels (FGs)~2.4 mm in diameter, filled with a 12.6% weight fraction of magnetite particles of 200–300 nm in diameter, were synthesized. A detailed characterization of the physicochemical and magnetic properties of FGs was carried out, as were direct measurements of the field dependence of the attractive force for FG-beads. The hydrodynamic effects of the positioning of FG-beads in a fluid flow by a magnetic field were studied experimentally in a model vessel with a fluid stream. Experimental results were compared with the results of mathematical and computer modeling, showing reasonable agreement. The contributions of the hydrodynamic and magnetic forces acting on the FG-bead in a fluid flow were discussed. Obtained forces for a single ferrogel implant were as high as 0 to 10−4 N for the external field range of 0 to 35 kA/m, perfectly in the range of mechanical force stimuli in biological systems.
Felix Blyakhman (1, 2), Alexander Safronov (2,3), Ilya Starodumov (1,2), Darya Kuznetsova (1,2), Galina Kurlyandskaya (2)
Remote Positioning of Spherical Alginate Ferrogels in a Fluid Flow by a Magnetic Field: Experimental and Computer Simulation // Gels 2023, 9(9), 711
(1) Department of Biomedical Physics and Engineering, Ural State Medical University, Ekaterinburg 620028, Russia
(2) Institute of Natural Sciences and Mathematics, Ural Federal University, Ekaterinburg 620002, Russia