
5. Подходы к моделированию вращающихся систем: в абсолютной (неподвижной) и в относительной (вращающейся) системе координат
В зависимости от особенности и сложности моделируемого физического явления, происходящего в жидкости или газе, оно может быть смоделировано, как в абсолютной (неподвижной) (рис. 4а), так и в относительной (вращающейся) (рис. 4б) системе координат.
5.1. Моделирование вращающихся систем в абсолютной (неподвижной) системе координат
В данном случае подразумевается, что расчетная область или её часть (подобласть) вместе с частицами жидкости или газа рассматриваются в абсолютной (неподвижной) системе координат, в инерциальной системе отсчета (рис. 4а). Но при этом, в данном объеме могут существовать тела (поверхности), которые испытывают вращение.
5.1.1. В рамках данного подхода можно корректно описывать движение жидкости или газа около любого вращающегося твердого тела, моделируемого как модификатор «Подвижное тело». При этом задается закон вращения для «Подвижного тела» (см. п. 3.6.).
5.1.2. Таким же образом, без перехода в относительную систему координат, можно описать движение жидкости или газа около тела (поверхности) вращения, вращающегося вокруг своей оси вращения. При этом, необходимо задать вращение на ГУ, соответствующем данной вращающейся поверхности (см. п. 3.3.). Корректность подхода не теряется, при любом изначальном направлении потока жидкости или газа относительно данного тела.
5.2. Моделирование вращающихся систем в относительной (вращающейся) системе координат
В данном случае подразумевается, что расчетная область или её часть (подобласть) вместе с частицами жидкости или газа рассматриваются в относительной (вращающейся) системе координат, в неинерциальной системе отсчета (рис. 4б). В таком случае на частицы жидкости или газа действуют силы инерции (см. п.2.1., 2.2.).
Таким образом можно описать, движение жидкости или газа около тела, поверхности которого могут не являться поверхностью вращения, а само вращение происходит вокруг любой оси. При этом, чтобы учесть силы инерции, необходимо задавать для расчетной области (регион) или её части (подобласти) локальную вращающуюся систему координат (для региона см. (п.3.2, 3.4) для подобласти 3.5).
6. Типовые постановки задач с вращением во FlowVision
6.1. Движение жидкости или газа около тела (поверхности) вращения, вращающегося вокруг своей оси вращения
Данный тип задач удобно решать в рамках похода, описанного в п.5.1. (5.1.2).
Задается ЛСК (начало и направление осей) в которой добавляется Вращение, для которого указывается Скорость, Центр и направление вращения (см. п.3.1).
Задаётся вращения на поверхности. ЛСК и Вращение устанавливаются на граничном условии выделенной «вращающейся» поверхности – на этой поверхности предполагается добавление тангенциальной скорости ω*R (см. п.3.3.).
Ограничения:
а. поверхность на которой задается вращение в ЛСК должна быть поверхностью вращения, а само вращение происходит вокруг оси данного тела вращения
б. Ограничение для моделирования теплопередачи: в случае задания ЛСК и Вращение на поверхности стенки или связанного граничного условия, необходимо учитывать, что локальный источник тепла не будет вращаться вместе с поверхностью и нагрев поверхности и области вблизи нее будет локальным, а не равномерным.
Пример: Вращение колес автомобиля:
Задача - прямое движение автомобиля. Рассмотрим движение автомобиля в системе координат автомобиля, т.е. в расчетной области автомобиль неподвижен – его движение моделируется скоростью набегающего потока, которая равна скорости автомобиля и с учетом ветра.
Во внешний объем «Автомобиль» вставляется как импортированный объект на котором задается модификатор "Подвижное тело". Т.к. сам автомобиль/объект не двигается в расчетной области, в его свойствах отключается обновление (рис.11).
Для учета движения-вращения колес задается вращение на поверхностях колес с использованием ЛСК.
Т.к. колеса автомобиля имеют разные оси вращения (ось передних и оси задних колес) то ЛСК задаются для каждой пары колес. В каждой ЛСК задается Вращение (вектор угловой скорости). Создаются отдельные граничные условия для каждой пары колес для которых в свойствах выбираются соответствующие ЛСК и Вращение (рис.12).
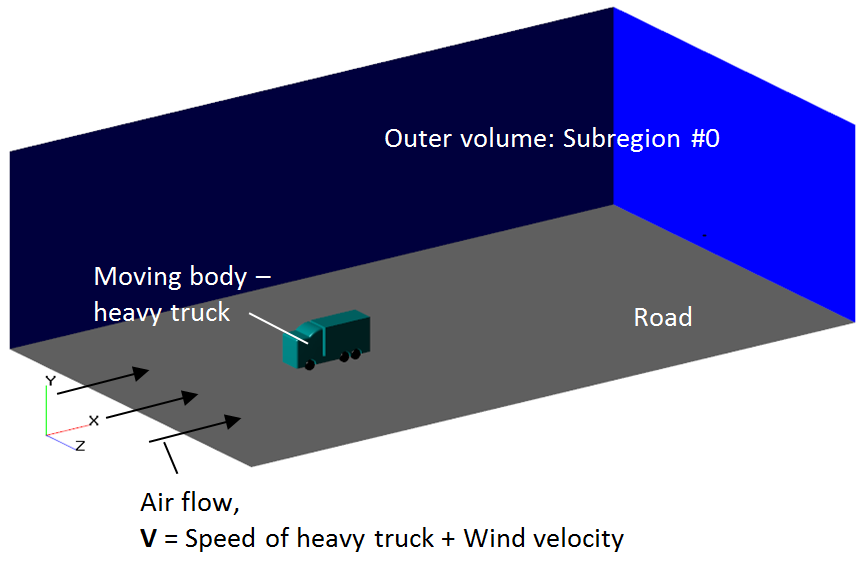
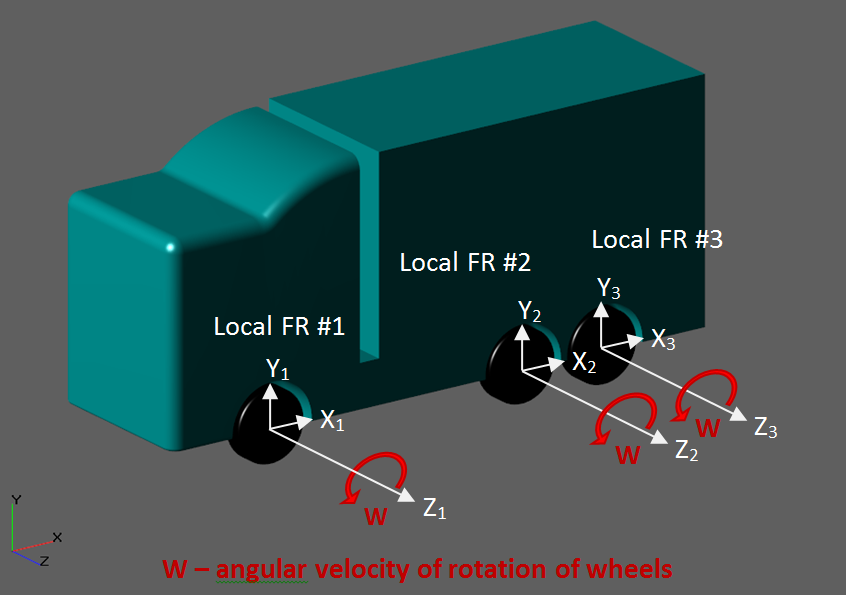
Рис.11. Движение грузовика. Задание вращения колес в ЛСК.
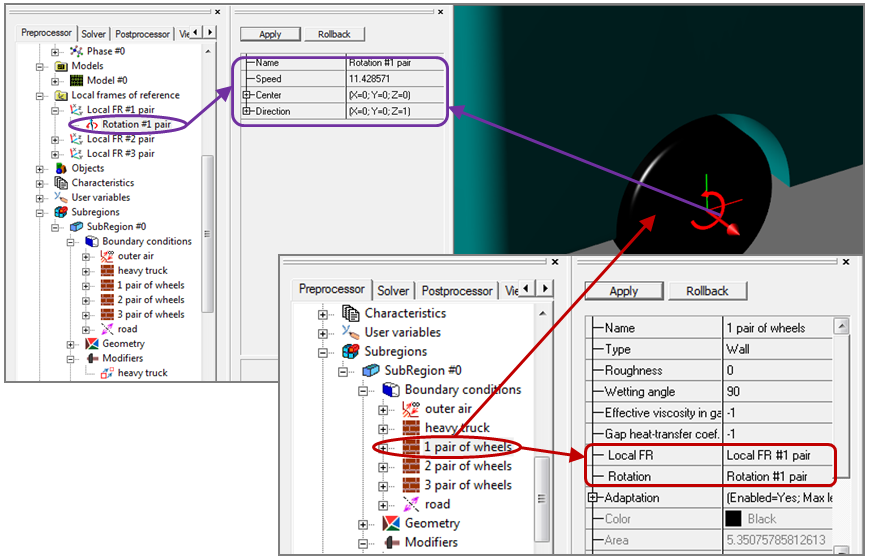
Рис.12. Движение грузовика. Задание вращения колес в ЛСК.
Примечание: для данной задачи движения автомобиля необходимо учитывать движение покрытия дороги относительно автомобиля, это можно сделать несколькими способами:
- выделением дороги отдельным граничным условием и заданием для него условия проскальзывания для скорости
- ЛСК с заданием в ней движения. Значение скорости задается компонентами вектора скорости в ЛСК и будет соответствовать скорости автомобиля с противоположным знаком.
6.2. Движение жидкости или газа около тела произвольной формы, вращающегося вокруг любой оси
Данный тип задач можно решать в рамках похода, описанного в п.5.2.
Задается ЛСК (начало и направление осей) в которой добавляется Вращение, для которого указывается Скорость, Центр и направление вращения (см. п.3.1).
Задается вращение внешней области по отношению к вращающемуся телу. На Регионе задаются ЛСК и Вращение – это означает "включение" центробежной и Кориолисовой сил в уравнениях Навье-Стокса (см. п.3.2.). На граничном условии «вращающейся» поверхности также задаются ЛСК и Вращение (геометрия «вращающейся» поверхности может быть любой) (см. п.3.4.).
Ограничения:
а. геометрия не вращающихся тел, в том числе и внешние поверхности Региона, должны быть строго поверхностями вращения или связанным ГУ с назначенным периодическим условием связи
б. Ограничение для моделирования теплопередачи: в случае задания ЛСК и Вращение на поверхности стенки или связанного граничного условия, необходимо учитывать, что локальный источник тепла не будет вращаться вместе с поверхностью и нагрев поверхности и области вблизи нее будет локальным, а не равномерным.
Пример: Вращение лопастей ветровой установки с заданной угловой скоростью:
Рассмотрим задачу вращения лопастей ветровой турбины:
- Задается ЛСК + Вращение (ω – const)
- Задается ЛСК и Вращение на Регионе
- На поверхности лопаток задается отдельное граничное условие с заданием на нем ЛСК и Вращение
- Скорость набегающего потока задается на отдельном граничном условии в абсолютной системе координат.
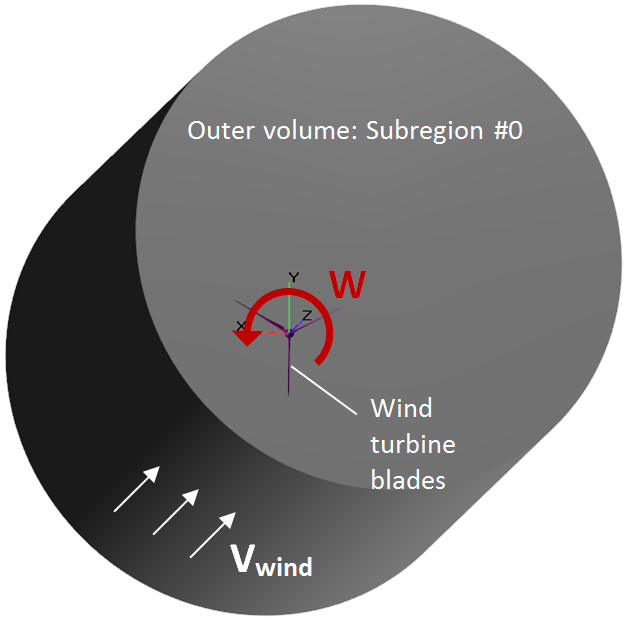 Рис.13. Моделирование ветровой турбины (Вращение на регионе и ГУ (поверхности лопаток)).
Рис.13. Моделирование ветровой турбины (Вращение на регионе и ГУ (поверхности лопаток)).
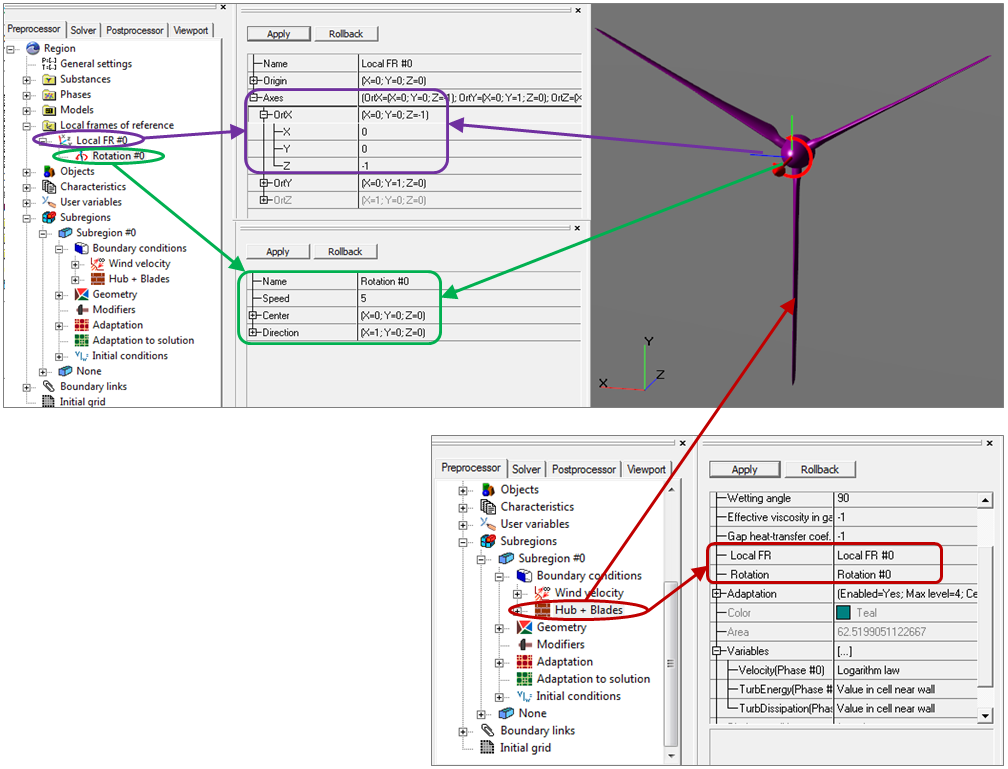 Рис.14. Задание вращения на граничном условии (поверхности лопаток).
Рис.14. Задание вращения на граничном условии (поверхности лопаток).
Примечание: Лопатки могут вставляться как "подвижное тело" (с отключенеим обновления) так и быть частью основной геометрии Региона (как подобласть). В случае, если лопасти вставляются во внешнюю подобласть как импортированный объект, то они могут быть встроены в основную геометрию (Импортированный объект > Встроить в основную геометрию). После вставки формируется вторая подобласть. В первой же подобласти (которая будет расчетной) добавляются поверхности лопаток.
6.3. Движение жидкости или газа около любого вращающегося твердого тела, моделируемого как модификатор «Подвижное тело».
Данный тип задач представляет поход, описанный в п.5.1. (5.1.1.).
Тело будет физически вращаться, перестраивая каждый шаг расчетную сетку. Вращающееся тело вставляется во внешнюю расчетную область как импортированный объект, на котором устанавливается Модификатор «Подвижное тело».
Вращение с заданной угловой скоростью задается вектором угловой скорости (компонент вектора X, Y и Z в глобальной СК) (см.п.3.5.) в свойствах Модификатора-Подвижное тело. Задание компонент вектора угловой скорости возможно формулой с помощью Редактора формул, зависящей от различных параметров, в том числе и расчетных.
Вращение так же может быть задано под действием гидродинамических сил. Для этого необходимо задать гидромоменты для соответствующих осей вращения, а также массово-инерционные характеристики, и, при необходимости, добавить ограничители для вращения – например, задать пространственную ось двумя точками в свойствах модификатора подвижного тела в ограничителях Степени свободы, тип – «2 степени свободы».
Ограничения: Задание движения подвижных тел весьма затратный метод в плане вычислительных ресурсов, поскольку подвижное тело изменяет свое положение на каждой итерации и происходит перестроение сетки вблизи подвижного тела – это существенно увеличивает время счета. Однако, подвижные тела становятся единственной возможностью моделирования в случае очень сложных законов движения или в составе сложных устройств.
6.3.1. Вращение лопастей вертолета вокруг оси Z с постоянной угловой скорость.
Во внешний объем-Регион вставлены три импортированных объекта: основное тело вертолета и две лопасти. Для каждого импортированного объекта задан Модификатор-Подвижное тело. Отметим, что вторую лопасть можно создать как копию первой, где в свойствах подвижного тела изменить начальное положение – поворот вокруг оси Z на 180 градусов.
Для основного тела вертолета в свойствах подвижного тела отключено обновление - тело включено в расчет, но для него не задается движение.
Для лопастей вертолета задаем значения компонент вектора угловой скорости. В данном случае Wz.
Т.к. у нас несколько лопастей, которые имеют одинаковую угловую скорость, то для удобства создаем пользовательскую переменную со значением угловой скорости, и уже в свойствах для каждой из лопастей, угловая скорость задается с помощью редактора формул – присваиваем компоненте Z созданную пользовательскую переменную (Рис.2.2.). При необходимости изменяем значение угловой скорости только в одном месте – пользовательская переменная - меняем значение пользовательской переменной. Пользовательские величины могут быть и константами и переменными величинами, а также возможно задание вектора.
Шаг по времени задается числом КФЛ: поверхностный КФЛ = 1.
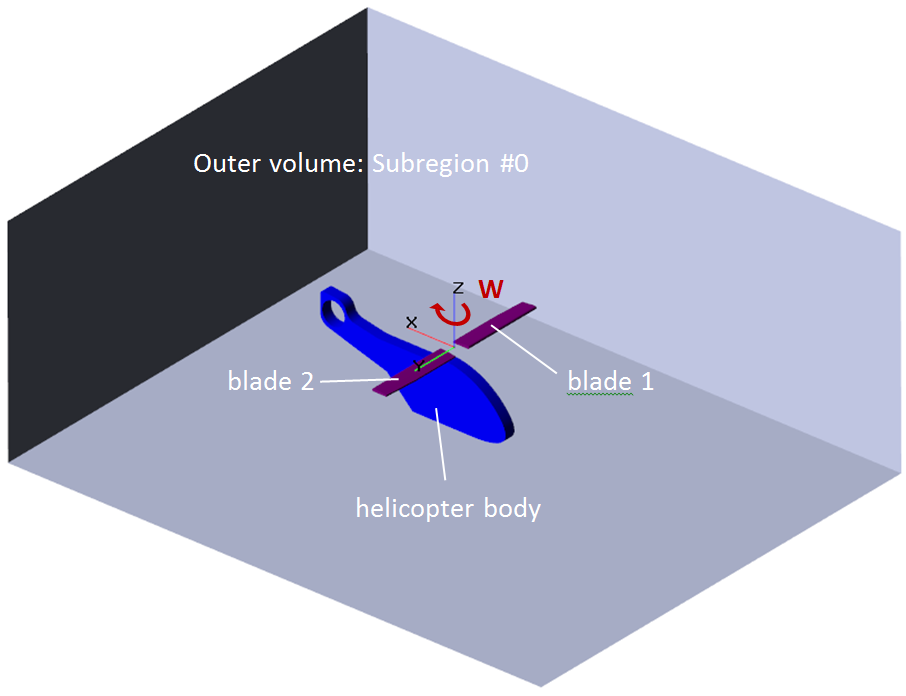 Рис.15. Вращение лопастей вокруг оси Z.
Рис.15. Вращение лопастей вокруг оси Z.
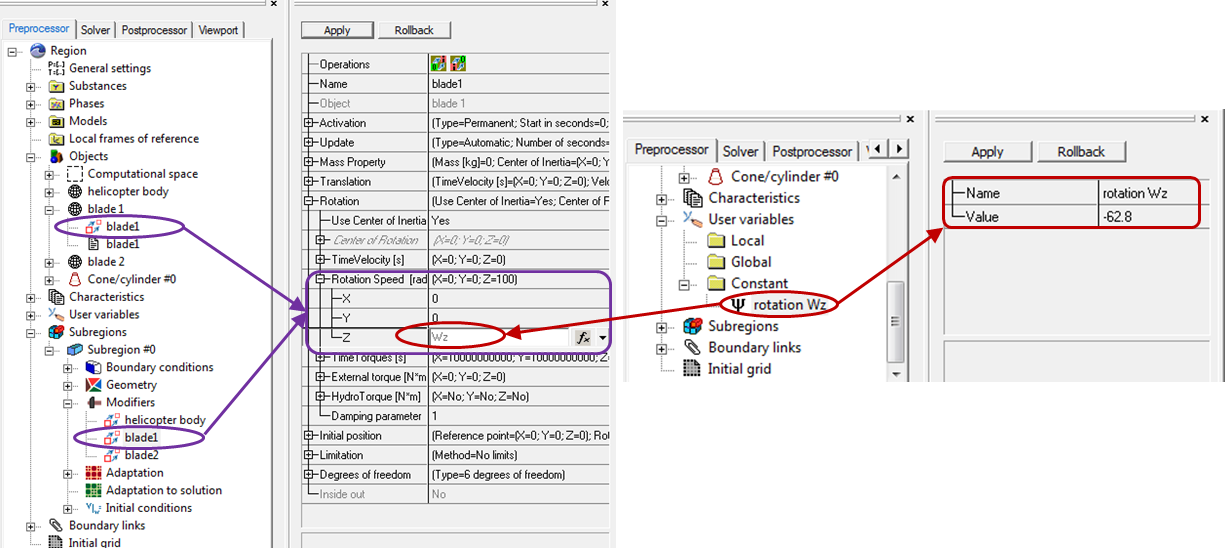 Рис.16. Задание вращения для лопасти 1.
Рис.16. Задание вращения для лопасти 1.
Примечание: для минимизации количества расчетных ячеек при построении сетки вокруг вращающихся подвижных тел можно использовать следующий прием: помимо адаптации по поверхности можно задавать адаптацию в объеме цилиндра, окружающего лопасть (см. Рис.17). Для данных цилиндров следует задать Движение:Вращение синхронное с вращением лопастей. Установить Адаптацию-Слитие до нулевого уровня во всем объеме – сетка перестраивается каждую итерацию и не накапливается ненужных ранее проадаптированных ячеек.
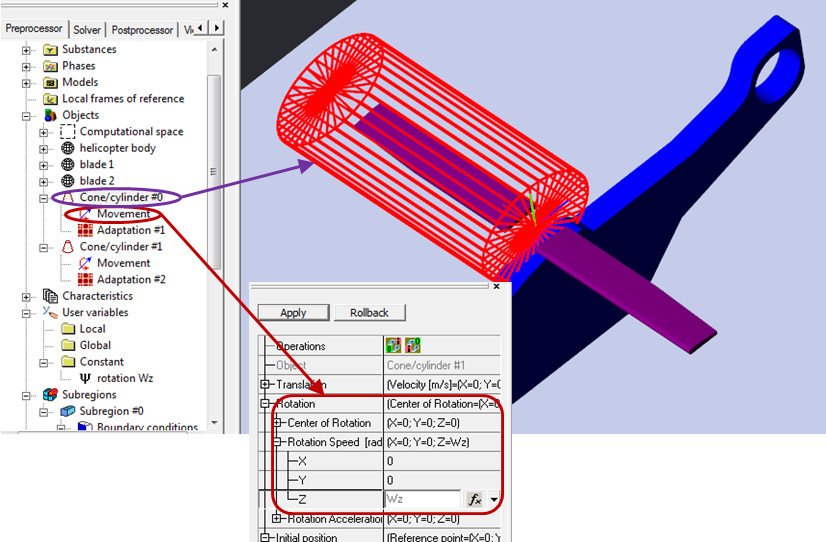 Рис.17. Задание вращения для объектов адаптации.
Рис.17. Задание вращения для объектов адаптации.
6.3.2. Свободное вращение лопастей под действием набегающего потока.
Лопасти ветровой турбины вращаются за счет скорости набегающего потока. В данном примере учтены геометрия как вращающихся частей ветровой турбины – лопасти, так и не вращающиеся части – гондола и мачта.
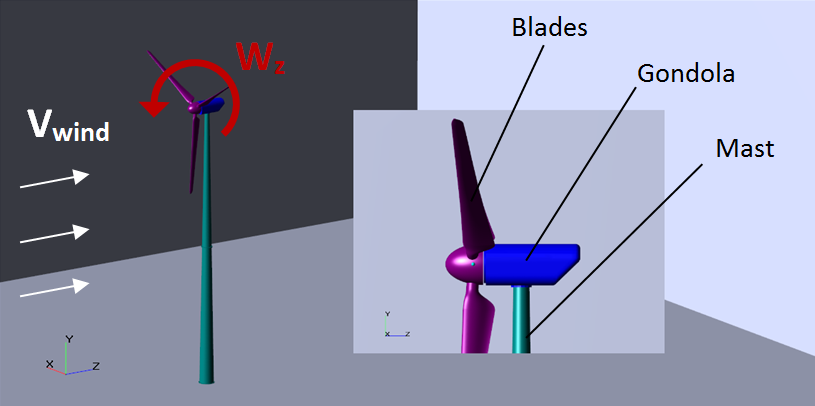
Рис.18. Свободное вращение лопастей ветровой турбины под действием потока воздуха.
Во внешний объем-Регион вставляются три импортированных объекта: лопасти, гондола и мачта. Для каждого импортированного объекта задается модификатор "подвижное тело".
В свойствах модификатора подвижного тела для лопастей задается:
- инерционные и массовые характеристики,
- включаются гидромоменты – либо все, либо, как в данном случае, только MZ.
- задается время начала действия моментов - 0.
Ограничители задавать нет необходимости, т.к. лопасти вращаются вокруг только одной из главных осей Z.
Для гондолы и мачты в свойствах подвижного тела отключается обновление (тела неподвижны).
6.4. Сложное вращение вокруг нескольких осей. Задание переменной угловой скорости
Помимо простого вращения (вокруг одной оси) возможны варианты задач с заданием более сложного вращения – тело вращается вокруг нескольких пространственных осей.
В этом случае, мы в каждый момент времени задаем один вектор угловой скорости – мгновенную угловую скорость. Этот вектор является суммой всех векторов угловых скоростей в данный момент времени.
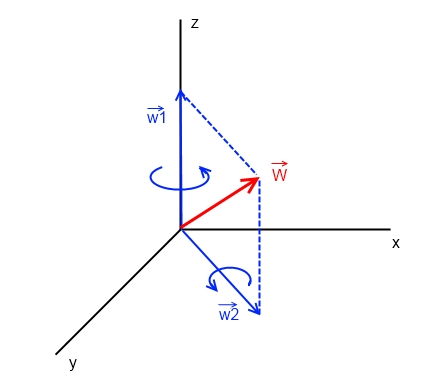
Рис.19. Мгновенный вектор угловой скорости.
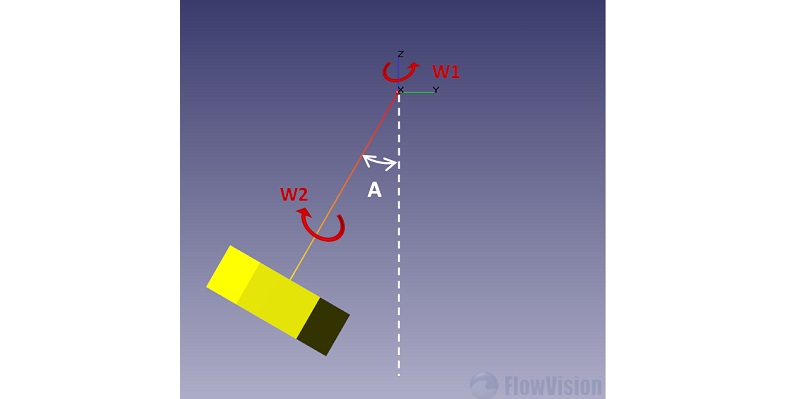
Например, имеем вращение вокруг двух осей W1 и W2. На текущий момент суммой данный векторов является вектор W. Для вращающегося тела задаем вращение компонентами вектора W (Wx, Wy, Wz - проекции на оси X,Y,Z).
6.4.1. Вращение тела вокруг двух осей с постоянной угловой скоростью
Тело вращается вокруг оси Z с постоянной угловой скоростью, а также вокруг собственной оси, которая отклонена от оси Z на некоторый угол A.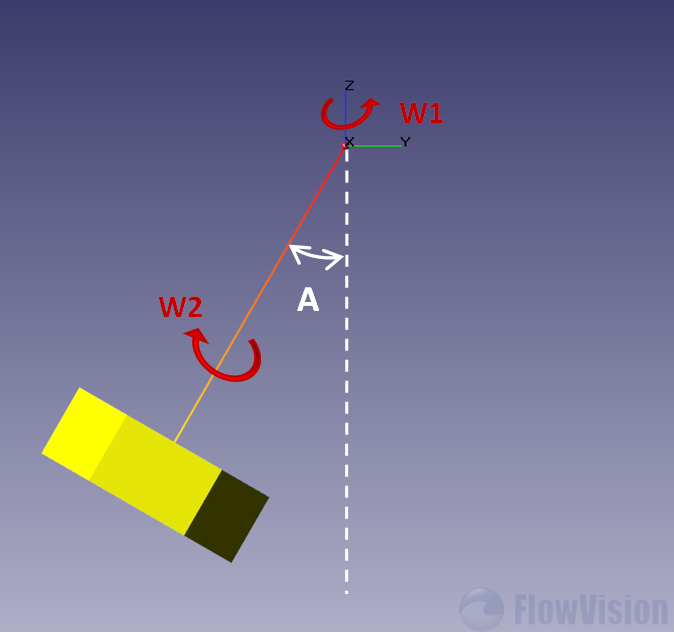
Рис.20. Пример 3.1. Вращение тела вокруг двух осей.
Для задания мгновенной угловой скорости необходимо знать положение осей вращения в каждый момент времени. Т.к. угловая скорость W1 постоянная, то мы можем найти положение собственной оси в любой времени и спроецировать на оси X, Y, Z. Затем можем сложить обе скорости покомпонентно.
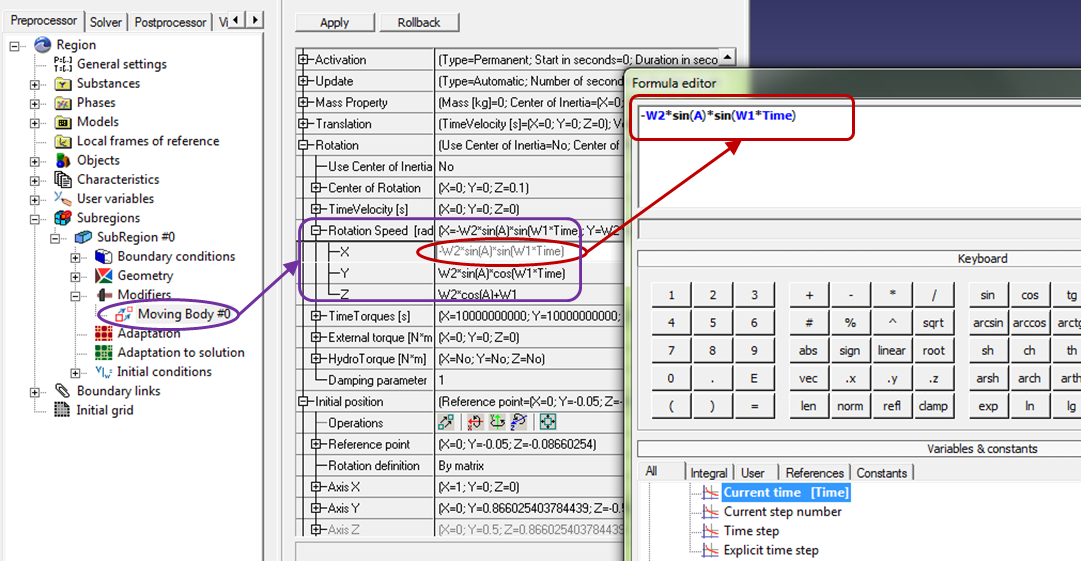 Рис.21. Задание компонент мгновенной угловой скорости.
Рис.21. Задание компонент мгновенной угловой скорости.
где "-W2*sin(A)*sin(W1*Time)" - проекция вектора W2 на ось X;
"-W2*sin(A)" – проекция вектора W2 на плоскость XY;
"W1*Time" – угол поворота вокруг оси Z [рад];
Time – текущее время.
Таким же образом находим проекции вектора W2 на оси Y и Z. Далее суммируем компоненты обеих угловых скоростей, получаем:
Wy=W2*sin(A)*cos(W1*Time)
Wz=W2*cos(A) + W1
6.4.2. Вращение лопастей вертолета вокруг оси Z c добавлением поворота лопастей вокруг собственной оси в заданный момент времени
Рассмотрим вариант вращения лопастей вертолета с угловой скосротью W1, причем через некоторые промужутки времени каждая из лопастей поворачивается на заданный угол (будем задавать поворо плавно со скоростью Wb1 и Wb2).
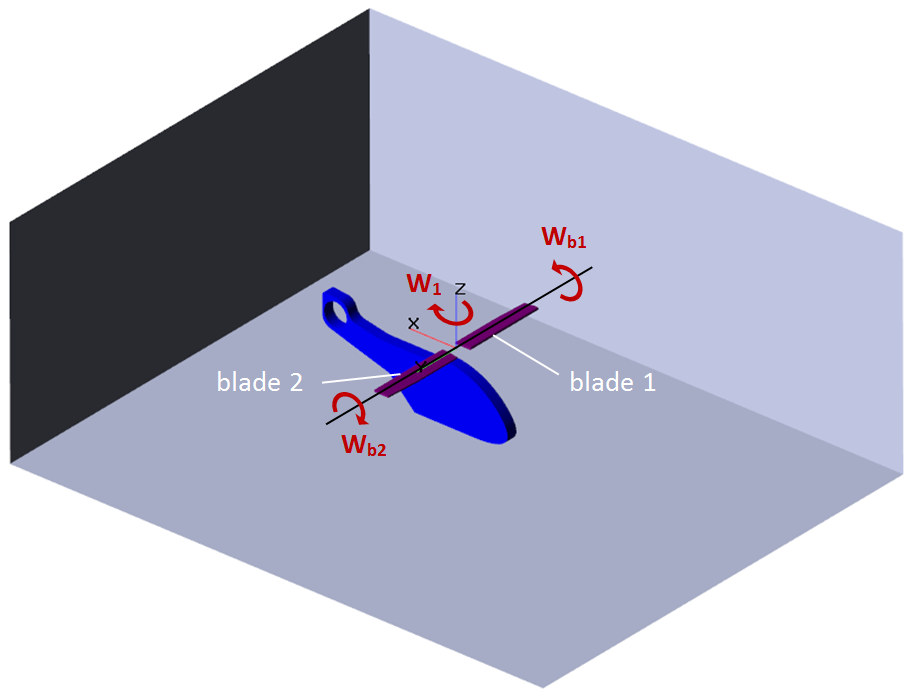 Рис.22. Пример 3.2. Вращение лопастей вокруг оси Z.
Рис.22. Пример 3.2. Вращение лопастей вокруг оси Z.
Задаем вращение для каждой из лопастей как сумму двух векторов угловой скорости W1 и Wb (см. пример 6.4.1).
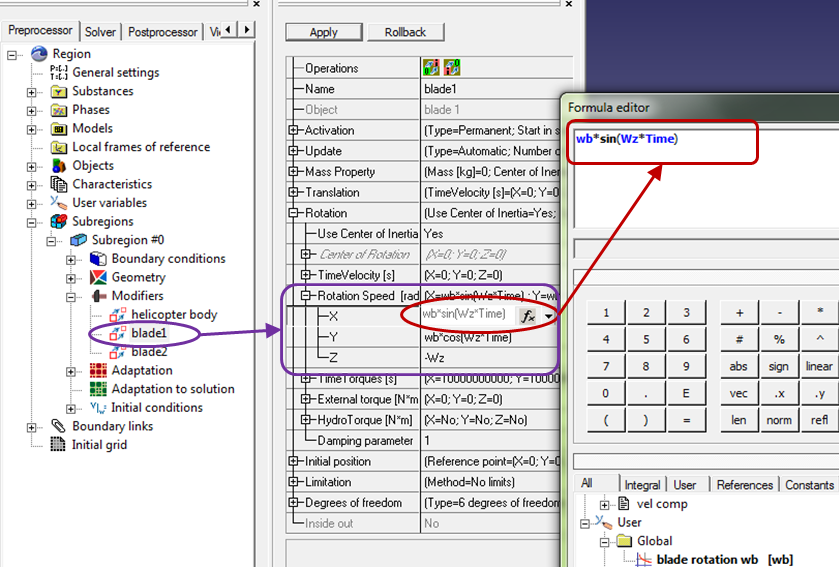 Рис.23. Задание компонент мгновенной угловой скорости.
Рис.23. Задание компонент мгновенной угловой скорости.
Т.к. поворот вокруг собственной оси лопатки осуществляется не постоянно, а только в определенный момент времени и сам поворот имеет конечный угол, то зададим значение Wb как глобальную переменную в виде условия, зависящего от времени или как в данном случае от итераций.
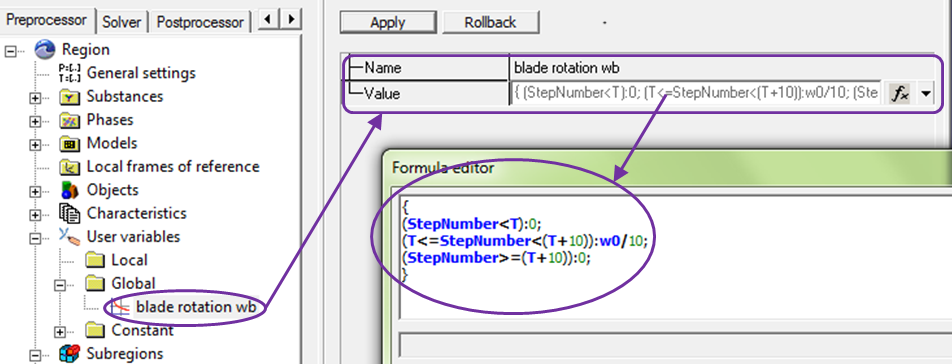
Рис.24. Задание угловой скорости зависящей от итераций.
где "StepNumber" – текущая итерация;
"T" – номер итерации на которой необходимо начать вращение лопасти вокруг собственной оси;
"(T+10)" – номер итерации на которой вращение лопасти вокруг собственной оси прекратится, т.е. через 10 итераций;
"w0" – угловая скорость, необходимая для поворота лопасти вокруг собственной оси на определенный угол (в данном случае за одну итерацию) [рад];
"w0/10" –данная угловая скорость повернет лопатку за 10 итераций (время действия угловой скорости) на необходимый угол, таким образом лопатка плавно повернется.
Примечание: Если использовать зависимость от итераций при задании угловых скоростей, то необходимо задавать шаг по времени постоянным и не менять его в течение счета.
Для более точного определения углов поворота или номера итерации удобно использовать пользовательские переменные, вычисляя значения формулой. Например, 30 градусов можно задать в радианах как формулу – (30*2*PI/360). Либо найти номер итерации через 2,5 оборота лопастей вокруг оси Z – (trunc((2,5*2*PI/Wz)/TimeStep)).
6.5. Вращение с использованием скользящих поверхностей
Поскольку вращение подвижных тел более затратный в плане вычислительных ресурсов метод по сравнению с вращением в подобласти, то в версии 309 появилась возможность задания вращения с использованием скользящих поверхностей.
Данный метод представляет поход, описанный в п.5.2.
Выделяется подобласть, которая будет вращаться в ЛСК относительно другой неподвижной подобласти, причем разделяющая их поверхность – «скользящая поверхность» связывает эти подобласти по всем переменным с учетом вращения.
Вращение лопастей ветровой установки с постоянной угловой скорость с использованием скользящей поверхности.
Геометрия лопаток гондолы и мачты вставлена как основная геометрия.
Пример: Вращение лопастей ветровой установки с постоянной угловой скорость с использованием скользящей поверхности.
Геометрия лопаток гондолы и мачты вставлена как основная геометрия.
Рис.25. Вращение лопастей ветровой установки.
Необходимо выделить область, которая будет вращаться в ЛСК с учетом всех требований к геометрии. В данной задаче необходимо отделить объем с лопатками и носом от гондолы и мачты.
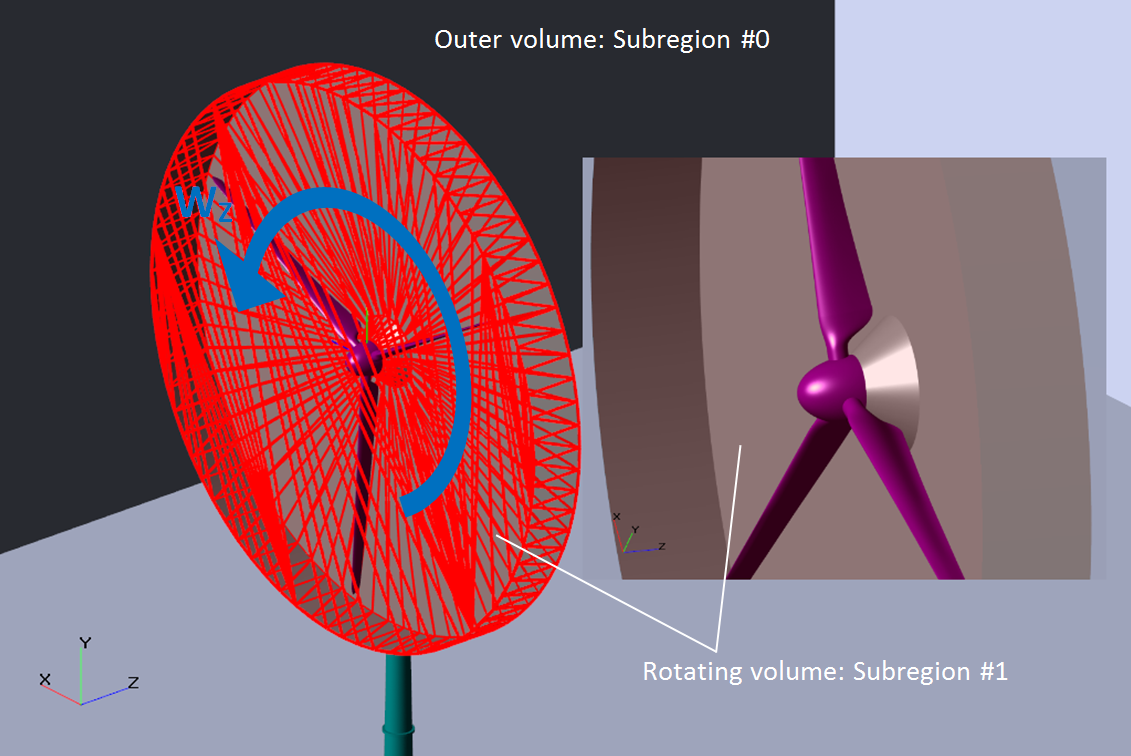
Рис.26. Создание дополнительной подобласти с помощью скользящей поверхности.
При создании проекта, делается следующее:
- создается сеточная геометрия скользящей поверхности в CAD системе или средствами FV. В случае, когда скользящая поверхность пересекается с основной геометрий, то необходимо оставить ее не замкнутой и максимально приближенной к основной геометрии;
- геометрия для создания скользящей поверхности вставляется как "Импортированный объект";
- создается ЛСК и Вращение;
- создается скользящяя поверхность (папка Скользящие поверхности) на базе импортированного объекта. Для скользящей поверхности задается ЛСК и Вращение. Далее скользящяя поверхность вставляется в расчетную область, в результате чего, образуется дополнительная подобласть;
- скользящие поверхности в обеих подобластях выделяются отдельными граничными условиями, для которых задется тип ГУ - связанное;
- связывание подобластей - создаются условия связи с типо связи – Скользящая поверхность;
- задаются ЛСК и Вращение на вращающейся Подобласти;
- на ГУ поверхностей вращающихся лопаток задается ЛСК и Вращение.
Ограничения: геометрия, с которой пересекается скользящая поверхность д.б. основной геометрией, а не подвижным телом. Невращающающиеся части во вращающиейся подолжасти д.б. телами вращения. При построении сетки необходимо, чтобы ячейки были одинаковыми с обеих сторон скользящей поверхности, если необходима адаптация, то ее следует проводить в обеих подобластях.
6.6. Обращенное вращение
По аналогии с задачами внешней аэродинамики, где зачастую полет тела моделируется в обращенной постановке (поток движется на встречу тела) можно решать некоторые задачи с вращающимися телами. Например, движение тела в бассейне по окружности можно рассмотреть, как движение потока навстречу покоящемуся телу (Рис. 27). Такую задачу нельзя решить рассматривая только часть бассейна (сектор) используя Постановку 6.2, так как левая и правая граница расчетной области не являются ни телами вращения и не могут считаться периодическими поверхностями.
Пример: Задание движения тела в бассейне по окружности в секторной постановке
 Рис.27.
Рис.27.
- на входном граничном условии задается профиль скорости, соответствующий ω*r;
- в обращенной постановке вместе с потоком жидкости относительно тела также движутся и границы бассейна, поэтом необходимо задание вращения для этих границ с той же частотой ω.
